


-
-
 Flowmatik
Flowmatik -
 Napędy pneumatyczne
Napędy pneumatyczne -
 Sprężyny gazowe i amortyzatory przemysłowe
Sprężyny gazowe i amortyzatory przemysłowe -
 Zawory i elektrozawory pneumatyczne
Zawory i elektrozawory pneumatyczne -
 Zawory elektromagnetyczne membranowe
Zawory elektromagnetyczne membranowe -
 Łączniki przewodów i rur
Łączniki przewodów i rur -
 Armatura gwintowana
Armatura gwintowana -
 Szybkozłącza, złącza do węży
Szybkozłącza, złącza do węży -
 Armatura przemysłowa ze stali nierdzewnej
Armatura przemysłowa ze stali nierdzewnej -
 Przygotowanie powietrza - bloki, reduktory, filtry
Przygotowanie powietrza - bloki, reduktory, filtry -
 Zawory kulowe - Armatura Przemysłowa
Zawory kulowe - Armatura Przemysłowa -
 Węże pneumatyczne, węże przemysłowe
Węże pneumatyczne, węże przemysłowe -
 Festo
Festo -
 SMC
SMC -
 Technika pomiarowa
Technika pomiarowa -
 Technika próżniowa
Technika próżniowa -
 Próżnia przemysłowa
Próżnia przemysłowa -
 Kleje, Smary, Spraye
Kleje, Smary, Spraye -
 Kompresory
Kompresory -
 Osuszacze, uzdatnianie powietrza
Osuszacze, uzdatnianie powietrza -
 Zawory bezpieczeństwa
Zawory bezpieczeństwa -
 Zbiorniki ciśnieniowe
Zbiorniki ciśnieniowe -
 Instalacje pneumatyczne
Instalacje pneumatyczne -
 Narzędzia pneumatyczne
Narzędzia pneumatyczne -
 Technika lakiernicza
Technika lakiernicza -
 Pompy przemysłowe
Pompy przemysłowe -
 Urządzenia pomiarowe
Urządzenia pomiarowe -
 Bezpieczna pneumatyka
Bezpieczna pneumatyka -
 Hydraulika siłowa
Hydraulika siłowa -
 Nowości w ofercie
Nowości w ofercie -
 Wyprzedaż
Wyprzedaż
-
Silnik serwo EMMT-AS
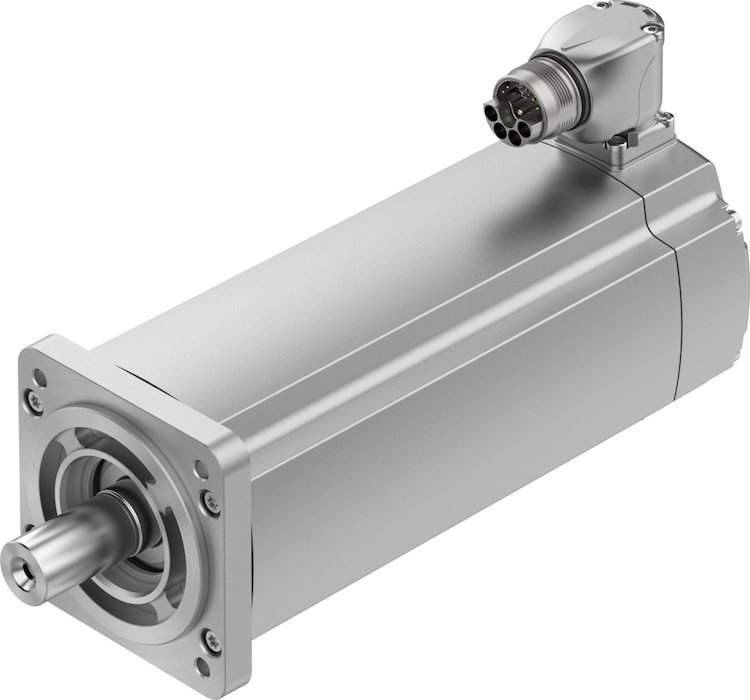

| Klasa odporności korozyjnej wg normy Festo | 0 - Brak obciążenia korozyjnego |
| Spełnia normę | IEC 60034 |
| Temperatura przechowywania | od -20 do 70 GC |
| Temperatura otoczenia | od -15 do 40 GC |
| Znak UKCA (patrz deklaracja zgodności) | wg przepisów UK dot. EMV - wg przepisów UK dot. EMV, wg przepisów UK RoHS, wg przepisów UK dot. urządzeń elektrycznych |
| Zgodność z LABS | VDMA24364-strefa III |
| Informacja o materiałach | Zgodność z dyrektywą RoHS |
| Waga produktu | od 4750 - 4750 G |

Skontaktuj się z nami wybierając interesujący Cię region








