


-
-
 Flowmatik
Flowmatik -
 Napędy pneumatyczne
Napędy pneumatyczne -
 Sprężyny gazowe i amortyzatory przemysłowe
Sprężyny gazowe i amortyzatory przemysłowe -
 Zawory i elektrozawory pneumatyczne
Zawory i elektrozawory pneumatyczne -
 Zawory elektromagnetyczne membranowe
Zawory elektromagnetyczne membranowe -
 Łączniki przewodów i rur
Łączniki przewodów i rur -
 Armatura gwintowana
Armatura gwintowana -
 Szybkozłącza, złącza do węży
Szybkozłącza, złącza do węży -
 Armatura przemysłowa ze stali nierdzewnej
Armatura przemysłowa ze stali nierdzewnej -
 Przygotowanie powietrza - bloki, reduktory, filtry
Przygotowanie powietrza - bloki, reduktory, filtry -
 Zawory kulowe - Armatura Przemysłowa
Zawory kulowe - Armatura Przemysłowa -
 Węże pneumatyczne, węże przemysłowe
Węże pneumatyczne, węże przemysłowe -
 Festo
Festo -
 SMC
SMC -
 Technika pomiarowa
Technika pomiarowa -
 Technika próżniowa
Technika próżniowa -
 Próżnia przemysłowa
Próżnia przemysłowa -
 Kleje, Smary, Spraye
Kleje, Smary, Spraye -
 Kompresory
Kompresory -
 Osuszacze, uzdatnianie powietrza
Osuszacze, uzdatnianie powietrza -
 Zawory bezpieczeństwa
Zawory bezpieczeństwa -
 Zbiorniki ciśnieniowe
Zbiorniki ciśnieniowe -
 Instalacje pneumatyczne
Instalacje pneumatyczne -
 Narzędzia pneumatyczne
Narzędzia pneumatyczne -
 Technika lakiernicza
Technika lakiernicza -
 Pompy przemysłowe
Pompy przemysłowe -
 Urządzenia pomiarowe
Urządzenia pomiarowe -
 Bezpieczna pneumatyka
Bezpieczna pneumatyka -
 Hydraulika siłowa
Hydraulika siłowa -
 Nowości w ofercie
Nowości w ofercie -
 Wyprzedaż
Wyprzedaż
-
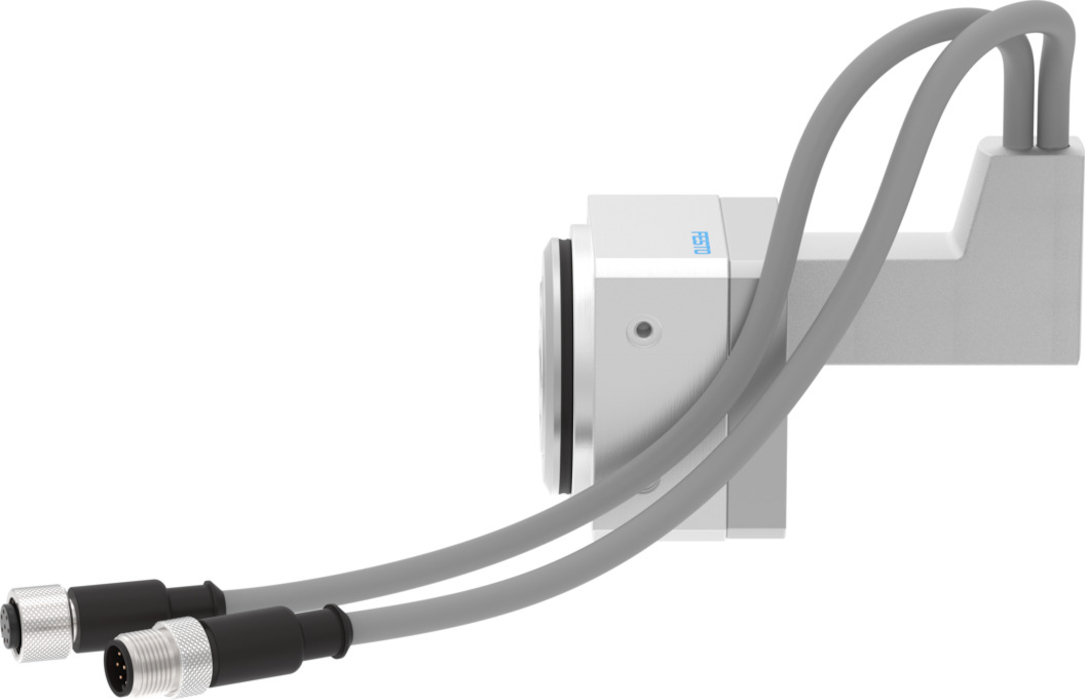
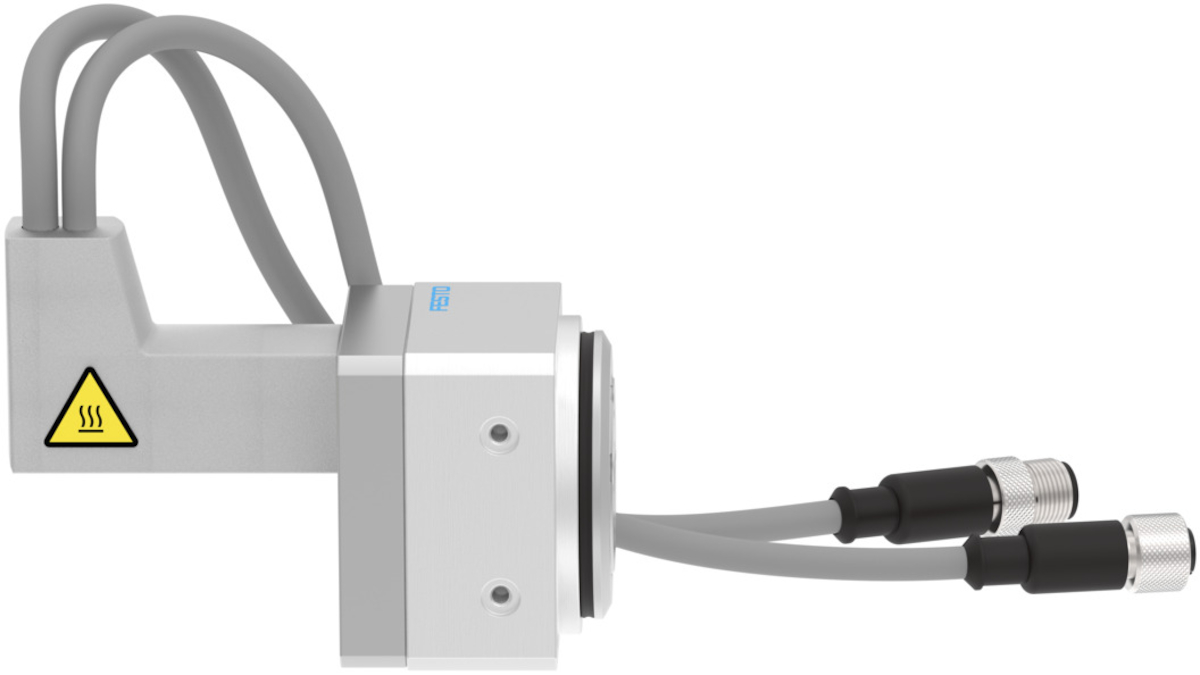
Napęd obrotowy ERMO
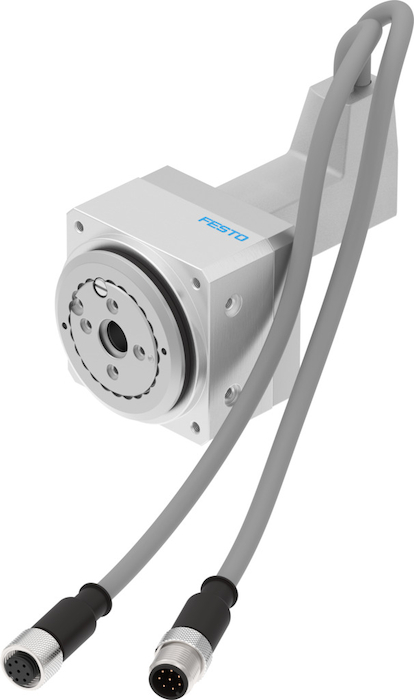
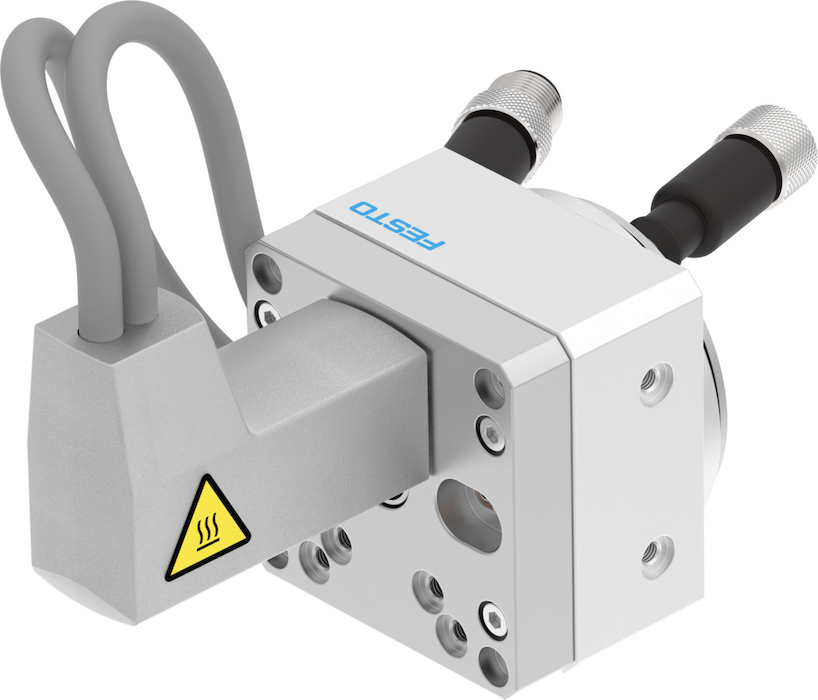








| Wielkość | 12 - 32 |
| Konstrukcja | elektromechaniczny napęd wahadłowy |
| Pozycja montażu | dowolny |
| Typ mocowania | Przy pomocy gwintu wewnętrznego |
| Kąt obrotu | bez ograniczeń |
| Przełożenie przekładni | 9:1 - 7:1 |
| Maks. prędkość w temp. 90° | od 200 - od 100 PMI |
| Luz skrętny | od 0.2 DEG |
| Powtarzalność | ±0,05 ° - ±0,1 ° |
| Maks. siła osiowa | 180 - 450 N |
| Maks. siła promieniowa | 200 - 550 N |
| Dopuszczalny masowy moment bezwładności | od 0.0003 - od 0.0164 KGY |
| Waga produktu | od 475 - od 2200 G |
| Kąt skoku pełnego kroku | 1.8 DEG |
| Tolerancja kąta kroku | ±5% |
| Czas pracy ciągłej | 100% |
| Prąd znamionowy, silnik | od 0.8 - od 4.2 A |
| Klasa izolacji | B |
| Typ silnika | Silnik skokowy |
| Czujnik położenia wirnika | Enkoder przyrostowy |

Skontaktuj się z nami wybierając interesujący Cię region








